Research
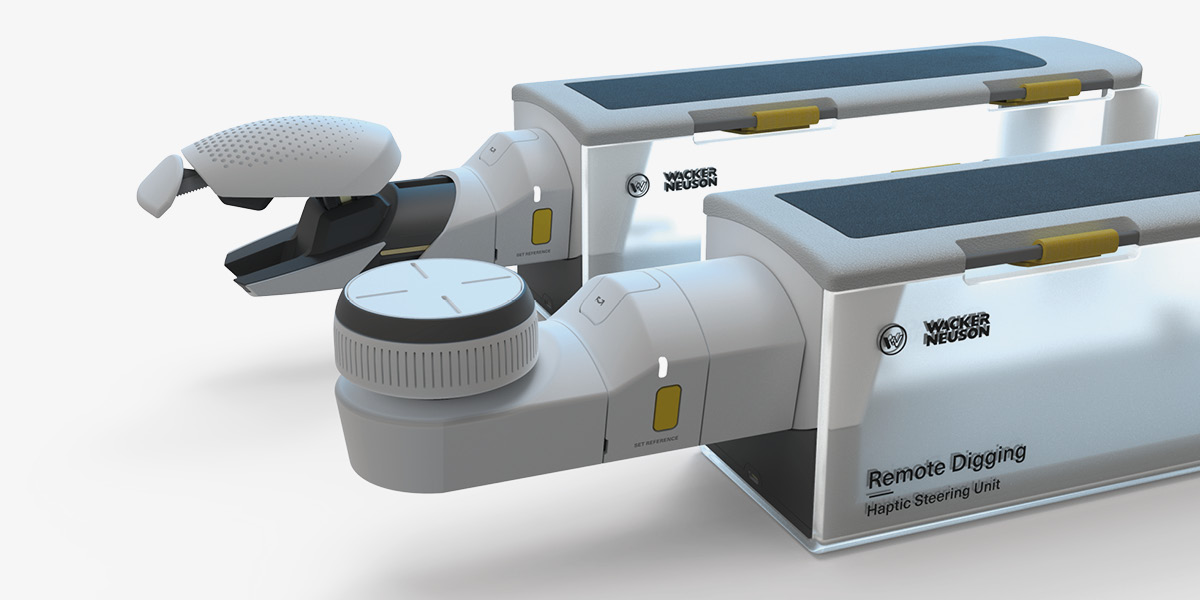
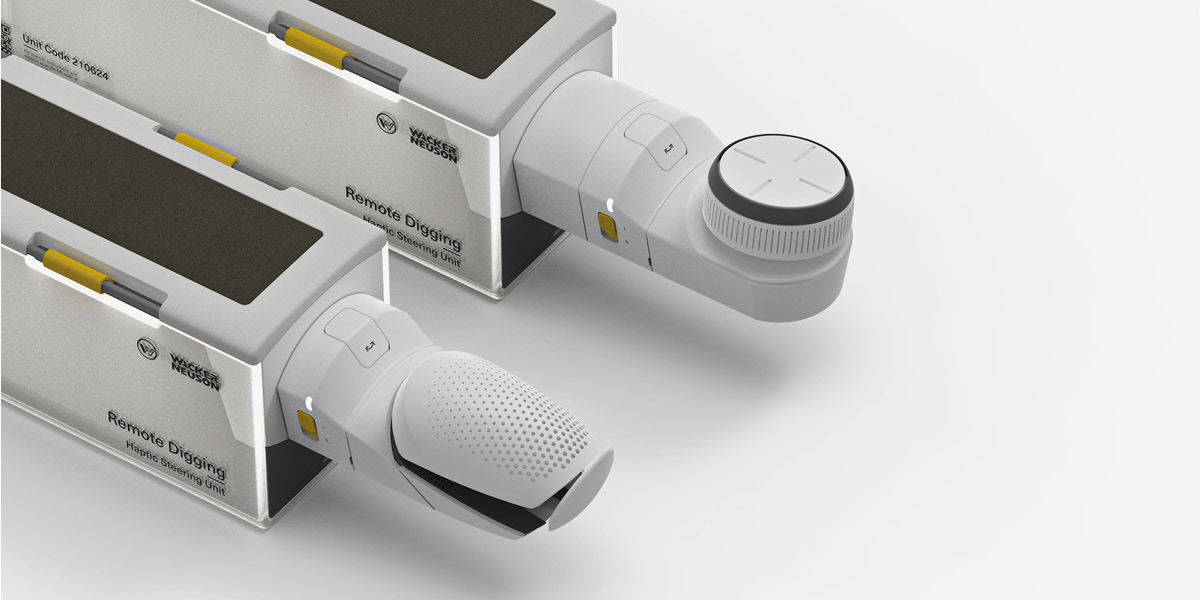
Wacker Neuson Remote Digging / Excavator control
In cooperation with Wacker Neuson

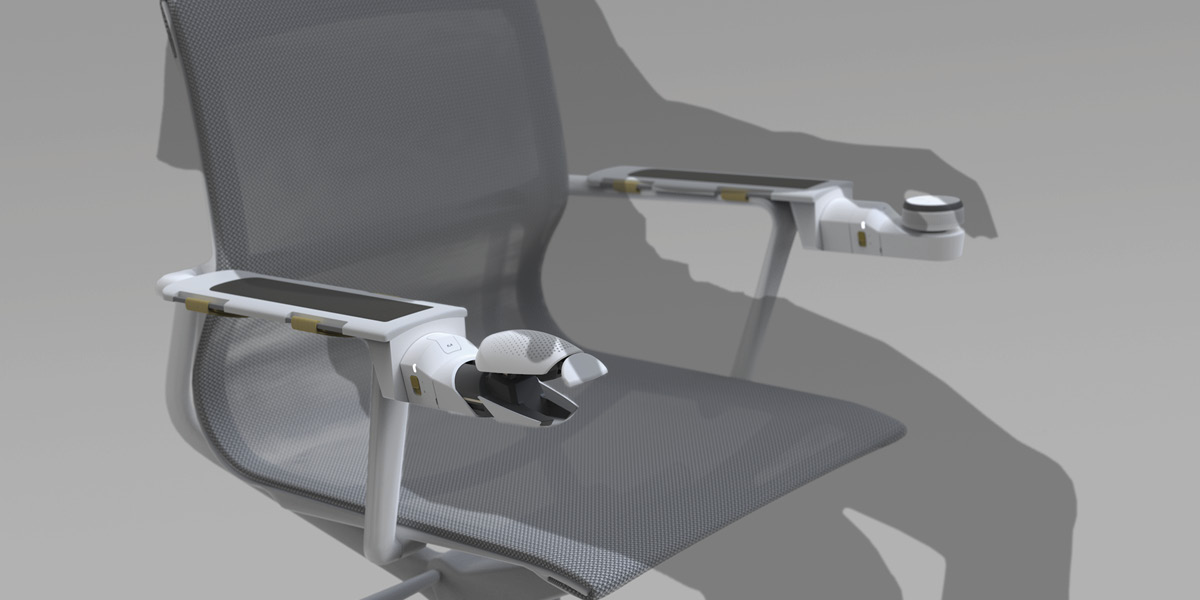
“Remote Digging - Haptic Steering Unit” is a remotely controlled excavator steering with focus on the use in office environments and home offices. The intuitive operation concept is based on movements of the human arm and hand while digging in sand. Haptic feedback on the controller (vibration- and force-feedback) allows a realistic translation from the excavator movements to the operator.