Forschung
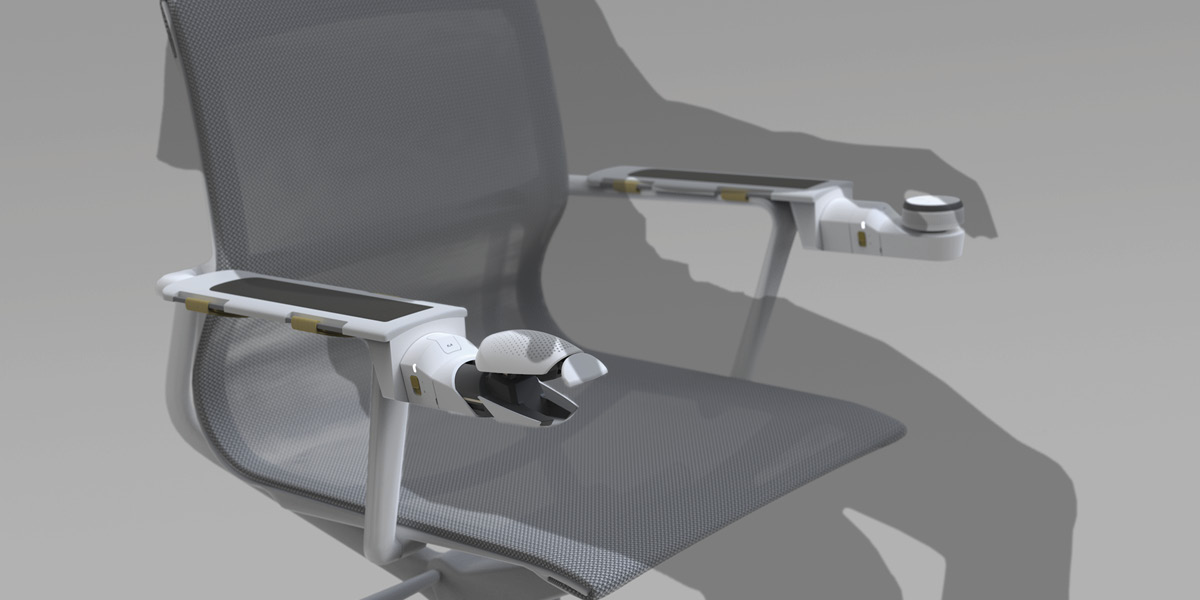
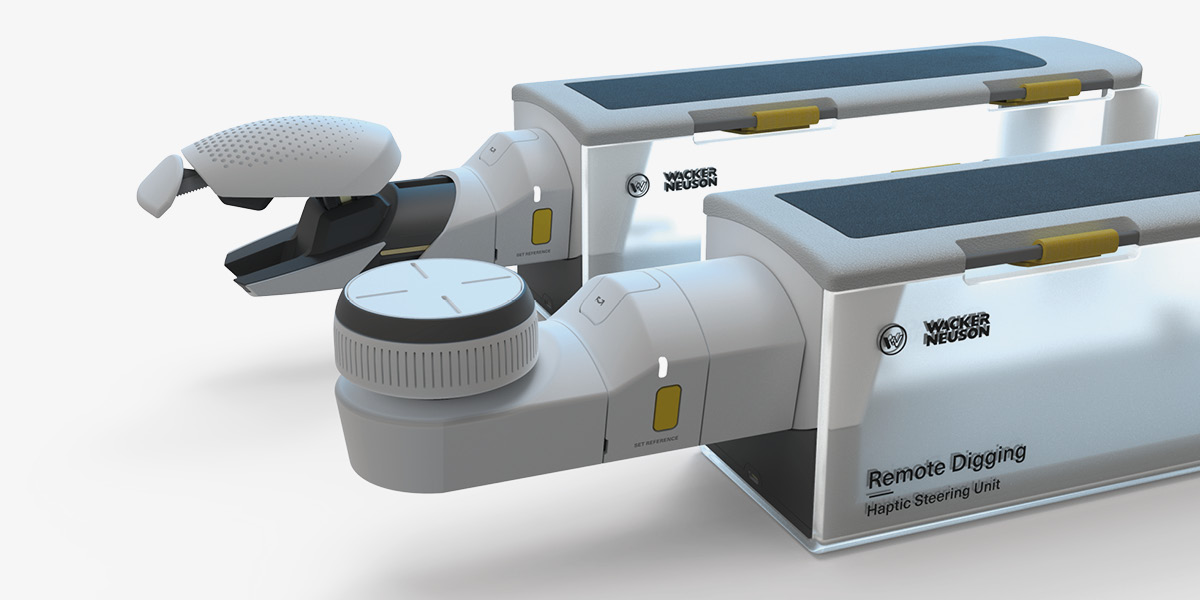
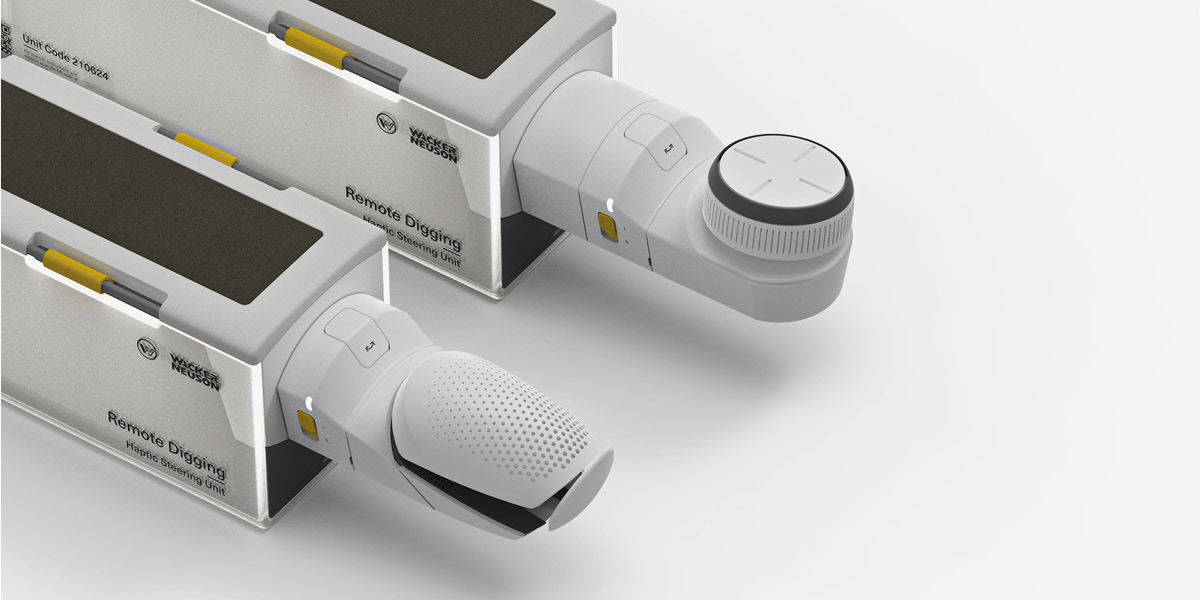
Wacker Neuson Remote Digging / Bagger Steuerung
In Kooperation mit Wacker Neuson

„Remote Digging - Haptic Steering Unit“ ist eine von der Baggerkabine entkoppelte Steuerung mit besonderer Ausrichtung auf die Bedienung aus Office-Umgebungen bzw. Home Offices. Das intuitive Bedienkonzept basiert auf den menschlichen Hand- und Armbewegungen beim Graben in der Erde. Eine realitätsnahe Übertragung der Baggerbewegungen wird durch haptisches Feedback der Controller (Vibrations- und Force-Feedback) ermöglicht.