PARUS
Passives Radarsystem zur Detektion unbemannter und nicht-kooperativer Fluggeräte und Flugsysteme
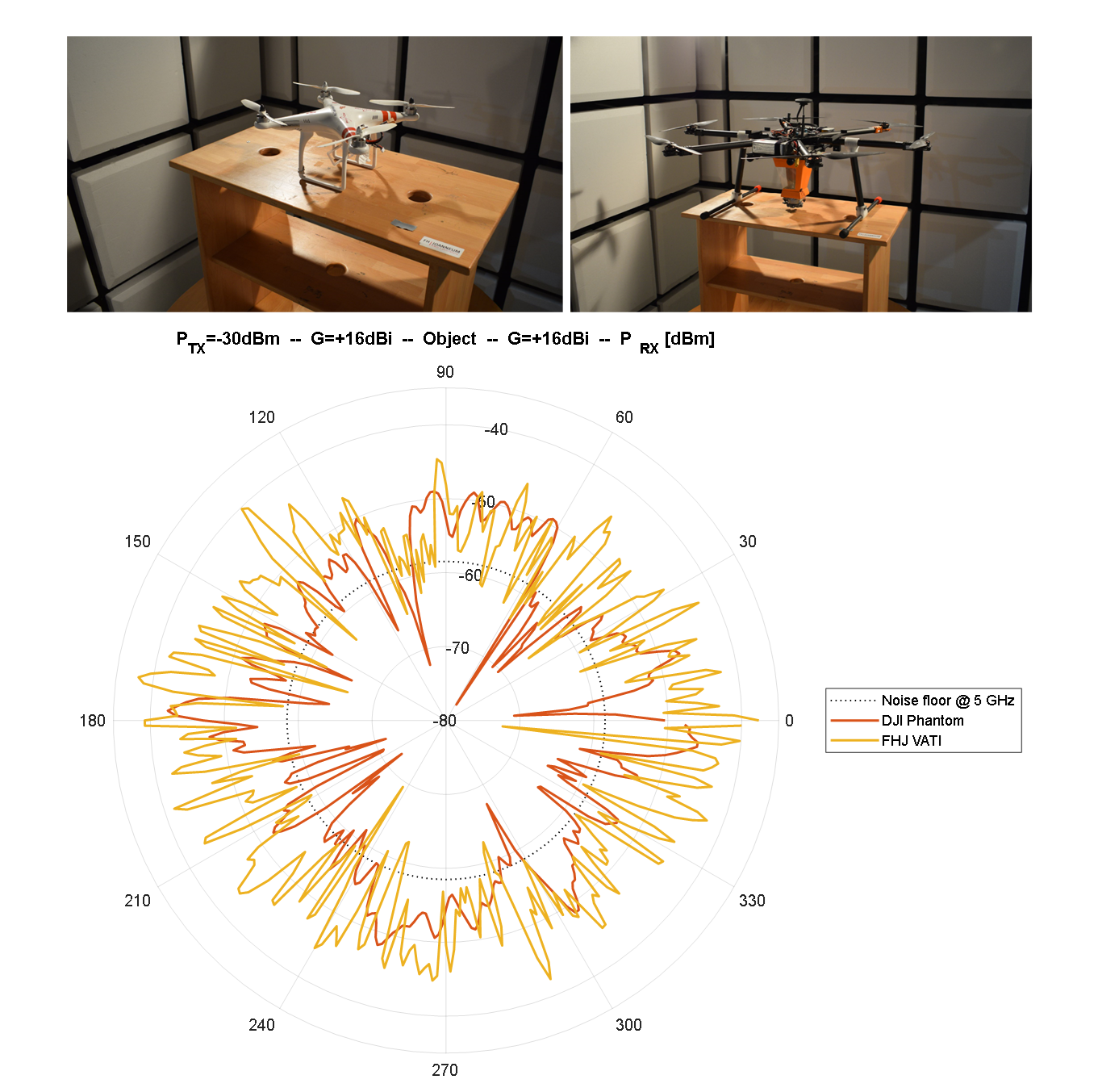
PARUS widmet sich der Erfassung von Flugobjekten mittels passiver („grüner“) Radarsysteme. Zur Vorbereitung von den möglichen Anwendungsszenarien wurde ein generisches Simulationsmodell passiver Radarsysteme konzipiert, das durch Feldmessungen mithilfe eines Funktionsdemonstrators validiert wurde. Ergänzt wurden diese Arbeiten durch die Erfassung von Radarsignaturen exemplarisch gewählter Geometrien. Das Projekt bildet die Grundlage für weiterführende F&E-Aktivitäten im Bereich energieeffizienter Flugsicherungstechnik und und Luftraumüberwachung.
Das im Rahmen der Sondierung entstandene Simulationsmodell umfasst einerseits ein Tool zur Abschätzung des zu erwarteten Radarquerschnitts von Luftfahrzeugen. Dieses verwendet eine geometriebasierte Prädiktion der Radar Cross Section (RCS): Das betrachtete Luftfahrzeug wird dazu in Grundgeometrien zerlegt und die Einzelrückstrahlungen der verwendeten Objekte zur Gesamt-RCS überlagert. Ein zweites Prädiktionstool betrachtet die spezifische Geometrie beim operativen Einsatz eines bistatischen und passiven Radarsensors.
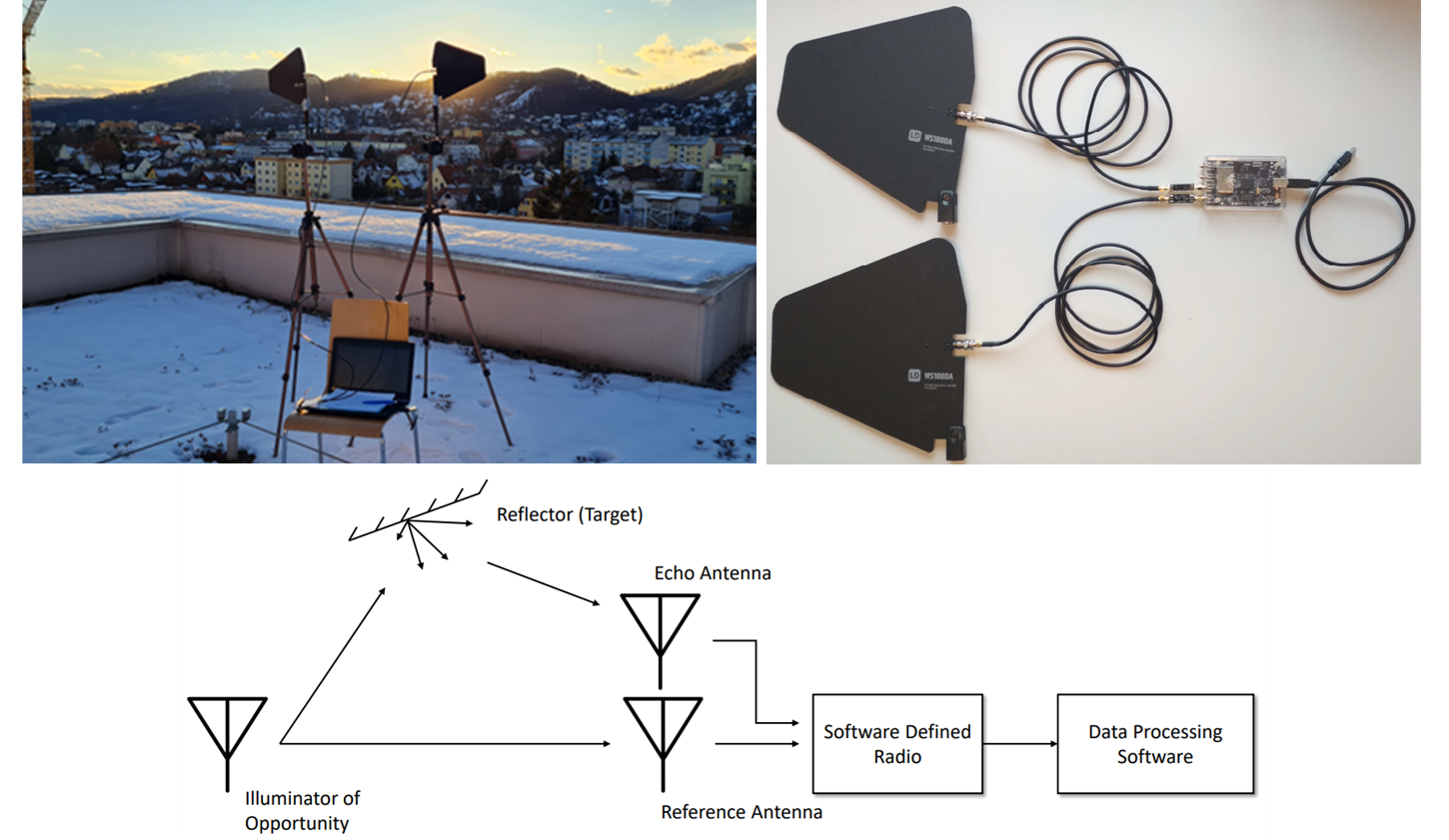
Basierend auf kommerziellen Software-Defined-Radio-Modulen wurde ein Referenzempfänger erstellt und im Rahmen von Feldversuchen zur Detektion von Radarreflexionen eingesetzt. Der Passivradar-Demonstrator basiert technologisch auf Low-Cost-Modulen und verzichtet auf die Vorverarbeitung der empfangenen Radarsignale. In Summe wurden so im Feldversuch sieben Messreihen mit jeweils drei bis elf Unterversuchen − insgesamt 50 Einzelmessungen − durchgeführt und ausgewertet. Hierzu wurden sowohl einfache Korrelationen zwischen dem ausgesendeten Referenzsignal und dem reflektierten Signal berechnet als auch die als „Range-Doppler-Map“ bezeichnete Kreuz-Ambiguitätsfunktion ermittelt.
Es zeigte sich, dass in der Mehrzahl der Messreihen eine Objektidentifizierung von statischen und bewegten Zielen mit hoher Wahrscheinlichkeit ganz oder teilweise (und reproduzierbar) möglich war. Als größte Einschränkung erwies sich dabei die Abtastrate des Analog-Digital-Wandlers im verwendeten Software-Empfänger, die für die nur grobe Auflösung der Entfernung (circa 150 m) verantwortlich war. Die in der Literatur häufig untersuchte Eignung von kommerziellen Sendesignalen, etwa UKW-Radio, DVB-T/T2 oder Mobilfunk, zur Beleuchtung eines Radarziels wurde in der Auswertungs- und Bewertungsphase auch auf aeronautische Signalquellen erweitert. Hierzu sind für Pulsradar, FMCW-Radar und DVOR die zu erwartenden (Auto-)Ambiguitätsfunktionen berechnet und in Bezug auf ihre Eignung als Sendesignal für Passivradarsysteme analysiert worden.